
• 未知空间自主探索:无人机能够在未知环境中进行自主探索,通过机载传感器获取环境信息,并实时构建地图以规划探索。
• 未知空间目标跟踪:无人机在未知环境识别并跟踪特定目标,并维持目标的可见性,实现稳定跟踪。
• 自主巡检:用户可以通过可视化界面或预设的巡航点位,指定无人机自主进行巡航任务。
• 多任务仿真:多场景、多环境、多任务算法仿真测试。
01 产品介绍
问天智飞推出的自主智能无人机实验平台L240(简称“问天L240”)是一款面向无人机领域相关专业应用研究和二次开发的中小型自主智能无人机平台。问天L240搭载高算力计算平台,高精度三维激光雷达、单目相机等硬件,具备以下多种优势:
• 先进的自主导航与飞行控制系统:
提供自主导航集成模块系统,包括定位、建图、规划和控制等模块,无需先验地图即可在复杂场景下敏捷自主飞行;提供频率不低于180 Hz且精度不低于3 %的定位反馈,不低于20 Hz的轨迹重规划频率,厘米级飞行控制和毫秒级快速响应,保障飞行安全和任务效率。
• 支持未知环境自主探索、自主目标跟踪等功能:
平台支持自主探索、自主跟踪系统一键启动,无需先验地图即可在未知复杂场景下,完成空间探索、目标跟踪等功能。
• 支持多种主流开源算法部署:
硬件平台支持多种主流开源定位、建图、规划和应用算法部署,用户基于飞机平台可支持对多种开源算法的“理论-代码-实验”闭环学习。
• 强大的拓展性:
支持多线激光雷达、单目相机、深度相机等多传感器和设备的快速安装与更换,适应不同的应用场景。
• 安全、可靠、耐用:
减少维护成本和意外停机的风险,并装配全包式注塑浆保,保障实验人员安全。
• 操作便捷、快速上手:
提升用户体验,配套了详细的实践操作教程,到手简要操作即可部署飞行,并提供丰富便捷的软件接口,助力用户二次开发。

问天L240搭载了完整未知环境自主导航飞行系统的软硬件模块,支持手动、半自动、全自主等多种控制模式,支持位置环境给点巡航、自主探索、自主跟踪等多种功能;碳纤维机架、全包注塑浆保、高强度机身和雷达保护罩等多处设计,能有效保护使用人员的安全,且具有小巧、灵活、安全等特点。

碳纤维机架,全包注塑浆保,金属打印雷达保护
飞机平台操作便捷,可快速上手实现各个模块化功能,支持用于竞赛参与、项目开发、科研验证与教学实践等多个场景,且配套详细的实践操作教程和售后服务保障。
02 支持功能
• 定位模块
1)高精度 LIO 定位与三维点云建图
2)基于 EKF 融合飞控 IMU 输出高频率定位信息
• 控制模块
1)支持一键起飞降落、紧急降落、紧急停桨
2)支持基于定位信息,世界系下对飞机进行位置闭环控制
3)支持遥控器手动飞行控制,即机体系下姿态和油门控制
4)支持高精度轨迹跟踪,并提供期望跟踪状态接口
• 规划模块
1)未知环境下自主导航飞行
2)支持手动指点飞行、预设序列点飞行
3)支持调用接口指定飞行目标点
4)基于定位模块输出配准点云信息,进行规划模块建图
• 应用模块
1)未知环境全自主探索
2)未知环境目标跟踪
• 仿真模块
1)支持飞机动力学仿真、飞机感知模拟等功能
2)未知环境下自主导航仿真
3)支持随机生成复杂环境地图
4)支持自主探索随机复杂环境地图
5)提供丰富可视化,助力二次开发环境支持
03 配件列表

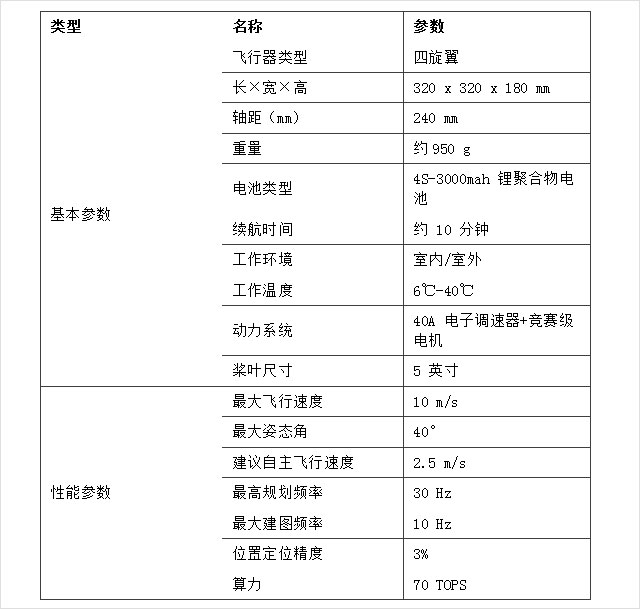
04 技术参数
05 开发方式
搭配详细使用教程和操作文档视频等,轻松上手使用。用户只需基本了解Ubuntu操作系统和ROS1系统,即可根据教程进行无人机使用和二次开发。支持遥控器手控姿态油门飞行、遥控器手控位置闭环飞行、半自主指点飞行、全自主序列点飞行和调用接口全自主飞行等多种控制模式。
06 应用场景
1、竞赛、科研、算法开发(机器人/无人机类)
• 目标:
培养高校学生的创新思维和实践能力,有助于提高学生的实践应用和工程能力,拓宽学术视野,增强自身就业竞争力。
• 案例:
问天L240自主导航系统使用便捷,接口丰富,提供丰富的定位、控制、规划等接口,用户可在平台测试开发多种移动机器人相关算法。

仿真飞行鲁棒性测试
2、项目实际应用
• 目标:
促进高校师生的教学成果研发,推动科研课题创新,间接使高校科研与产业界需求更贴近,助力产教融合可持续发展。
• 案例:
通过无人机自主导航提供的目标点接口,配合用户自行开发的上层巡检策略算法,实现在室内变电站环境下的自主巡检功能,并在实际的典型巡检场景测试了定位精度、效率和鲁棒性。后续在此基础上,通过指定序列点规划并开发巡检策略,实现了在室内环境下巡检系统功能。

实际巡检的室内变电站

实际巡检的变电站场景下的轨迹误差
3、其他场景应用
自主导航系统开放了目标点接口,用户可基于此面向应用层进行二次开发,为仓库货物检查统计、室内变电站抄表、室内配电房巡检、地下电缆隧道巡检和车辆违停巡检等多种场景提供系统应用的自主移动平台基础。

仓库货物检查统计

室内变电站抄表

地下电缆隧道巡检

室内配电房巡检

车辆违停巡检
以上内容为高博特编辑选取的新品推荐,尊重原创,如有侵权请联系删除。






